如何脱离双手操控任天堂?3D打印具有流体电路的
江苏激光联盟指南:
在最新一期《科学进展》的封面上,重点突出了该领域的一个项目软机器人。一项有前途的创新,该领域的重点是创造新型柔性充气机器人,它们使用水或空气代替电力来提供动力。软体机器人固有的安全性和适应性引起了人们对其在假肢和生物医学设备等应用中使用的兴趣。不幸的是,控制使这些软机器人弯曲和移动的流体一直特别困难——直到现在。

在过去十年中,软体机器人领域已经证明自己特别适合传统刚性机器人难以或无法实现的应用。对由流体设备(如液压和/或气动)驱动的柔性材料的依赖为软机器人带来了许多固有的好处,特别是在人机交互的安全性、低成本和几何形状的适应性方面复杂和/或精致的物体.然而,目前软体机器人实用性的一个关键障碍源于增加独立操作的软体执行器的数量(或自由度)通常需要相同或更多不同的控制输入。为了减少或消除对此类外部控制方案的需求,研究人员研究了多种方法,通过流体逻辑来增强软机器人的自主性。
与手动将独立流体回路连接到软体机器人的努力相比,人们越来越意识到能够将此类功能直接嵌入软体机器人系统的兴趣。然而,这种制造方法自推出以来,并未在软机器人界广泛采用,这可能是由于依赖于基于软光刻的流体回路。具体而言,将多层软光刻方法用于集成流体电路制造存在许多挑战,包括与以下方面相关的挑战:(i) 实施微制造协议的成本、时间和/或劳动力要求; (ii) 进入和培训限制(例如,使用洁净室设施和设备); (iii) 由于基于用户技能的手动校准步骤,设备功效和/或再现性的可变性; (iv) 光刻和微成形工艺(即平面或“2.5D”)的固有几何形状限制。此外,虽然研究人员已经展示了广泛的流体阀功能,但基于这种制造方法,尤其是基于压力增益操作的制造方法来实现更复杂的功能并不简单。
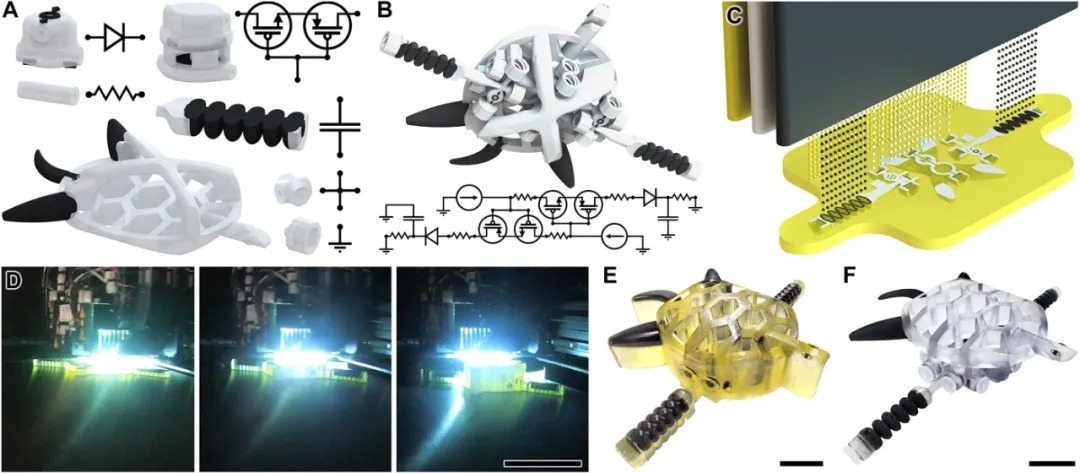
在这里,马里兰大学的研究人员提出了一种通过多材料“PolyJet 三维 (3D) 打印”(图 1)相加的新策略在一次打印中制造具有完全集成流体回路的统一软机器人系统。最初,可以在计算机辅助设计 (CAD) 软件中设计和组装流体回路组件、互连和接入端口等模块化组件,以及软机器人执行器和结构组件(图 1A),以生成具有完整软机器人的 3D 模型带有集成流体回路(图 1B)。尽管研究人员在软机器人和流体回路领域使用了广泛的增材制造技术,但他们认为 PolyJet 3D 打印特别适合作为统一实体同时制造这两类系统。 PolyJet 打印基于喷墨(“材料喷射”)工艺,其中各种光反应性和牺牲性支撑材料平行分布(具有连续的紫外线剂量),以逐行逐层地生产 3D 物体-层方式。此前,研究人员曾报道使用 PolyJet 打印来构建软执行器和机器人(即没有流体回路)和独立的流体阀。然而,在这项工作中,研究人员增材制造了一个完全集成的软机器人系统——即包括所有软执行器;物理特征(任意设计);和流体回路组件、互连件和端口——在一张印刷品中(图 1、C 和 D)。此过程需要同时打印三种不同的材料:(i) 柔顺光聚合物(图 1C,黑色),(ii)刚性光塑材料(图 1C,白色),以及(iii)牺牲水溶性支撑材料(图 1C,黄色)。使用牺牲支撑材料的一个警告是,它必须在打印过程后从外部区域和内部空隙和通道中去除或溶解(图 1E)。研究人员已经展示了许多技术来最小化 (42, 43) 甚至完全绕过支撑移除过程 (40, 44);然而,为了促进广泛的可及性,我们在这里使用了一种混合方法,将手动去除步骤(例如,大约几十分钟)与自主溶解协议相结合。结合起来,整个基于 PolyJet 的增材制造和后处理方法——其中大部分是自主的——可以在不到一天的时间内完成,以实现具有完全集成流体回路的 3D 多材料软机器人(例如,图1F)。